Language
農林業分野における自動運転化、電動化、デジタル化、低炭素化に関する技術開発を推進
最新情報
【2024/04/25】
ホームページ更新
【2024/03/31】
2021.9 ~2024.3 の間に実施した農業機械技術クラスター事業(果樹園農薬散布車両の自動運転開発)が終了
【2023/01/20】
【2022/12/09】
京都大学附属木津農場にて実験開始
【2022/11/11】
冬季の実験のために、自動運転農薬散布車両をりんご研究所から京都大学農場に移送
【2022/09/12】
株式会社アイ・モビリティプラットフォームの活動拠点を茨城県つくば市から愛知県豊田市に移転
【2022/08/26】
本格的な実圃場実験のために、自動運転農薬散布車両を青森県産業技術センターりんご研究所に移送
【2022/07/25】
筑波大学農場にて、自動運転農薬散布車両のデモ走行を実施
開発着手から4か月のスピード開発を完了
現地現物へのこだわり
熱意と志を原動力とし、異分野の仲間とも連携して社会に貢献する
デジタル技術を駆使し農林業の新たな魅力を培う
デジタル技術を活用して、障がい者を含む様々な人が農林業に参加できる機会を創出する
ニッチな事業領域に留まり、世界に羽ばたく
システム仕様・全体設計 電子システム開発・回路設計 ソフトウェア開発 機構システム開発 開発環境設計
車両制御技術 車両内通信技術(CAN) 各種センシングおよび電子技術 衛星測位応用技術 遠隔監視・操作技術
共同研究体制の構築支援 産官学共同研究の連携支援 コンソーシアム等各種会議体運営
最近の成果(2021年9月~2024年3月)
自動運転農薬散布制御の開発について5分間の動画にまとめてYouTubeに投稿しました。
本研究開発は2021年9月~2024年3月に行われた農業機械技術クラスター事業のもとで進められたものです。
2023年、京都大学と小さなプロジェクトを開始しました。
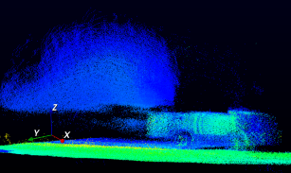
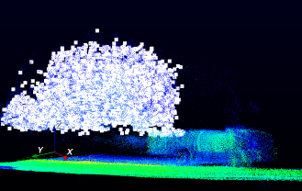
3次元LiDARが農薬散布時の個々の水滴とその点群の反射情報を正確な3次元情報とともに検出できる機能に着目し、農薬散布時の噴霧状態の数値解析を行っています。
このプロジェクトはまだ始まったばかりですが、この手法はスマート農業における様々な解析に拡張可能と考えています。
これについても簡単な動画を作成し、YouTubeに投稿しました。
2022年の成果
近年の測位衛星数の増加やマルチバンド衛星測位技術の普及により、果樹園のような樹木に囲われた環境下でも安定して高精度衛星測位ができることが分かりました。
青森県産業技術センター りんご研究所内の矮化りんご園にて自動走行実験を実施(2022年9月、10月)
マルチバンドRTK-GNSS基準局
作業者があらかじめ入力したデータに基づき、果樹がある場所と果樹のある方向のみ薬液を自動噴霧
2020年の活動成果
高精度衛星測位(RTK-GNSS)が使えない果樹園の環境で、マシンビジョンによる自己位置推定を活用した農薬散布車両の自動運転制御システムを開発。
本研究の一部は、総合科学技術・イノベーション会議のSIP「スマートバイオ産業・農業基盤技術」(管理法人:農研機構生研支援センター)によって実施されました。
予備試験路実験:旋回制御の後半における軌道補正(直進ゲートの中心付近に左右位置整合)
直進路および旋回路における軌道補正に活用
実際の果樹園における入口位置誘導マーカー
2020年10月
地磁気情報を活用した進行方向制御
デモ走行映像:筑波大学T-PIRC果樹園にて
筑波大学内矮化果樹園におけるデモンストレーション
このデモンストレーションでは、ArUcoマーカーと地磁気情報を併用した制御によって走行しました
株式会社アイ・モビリティプラットフォーム
設立 : 2017年7月4日
〒471-0025
愛知県豊田市西町1-26 第一三浦ビル 702号室
代表取締役 : 川本 雅之
資本金 : 990万円 (資本準備金: 690万円)
2024年4月 更新
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


