{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Contact us
- contact@i-mobilitypf.com
Language
Cultivate and promote technologies in automated driving, electrification, digitalization and Low-carbonization in agriculture and forestry fields
[April 25, 2024] Homepage update
[March 31, 2024] Our Agricultural Machinery Technology Cluster Project (Autonomous Driving Speed Sprayer
development : 2021.9 ~2024.3) has been completed.
[ January 20, 2023 ] Homepage update
[ December 9, 2022 ] Restart our project at the Experimental farm of Kyoto University
[ November 11, 2022 ] Transported the Autonomous SS vehicle from the Apple Research Institute in Aomori to Kyoto University farm for winter time experiment
[ September 29, 2022 ] Full function demonstration of Autonomous driving SS at apple orchard of the Apple Research Institute in Aomori Pref.
[ September 12, 2022 ] Moved the company office from Tsukuba(Ibaraki pref.) to Toyota(Aichi pref.)
[ August 26, 2022 ] Transported the Autonomous SS vehicle from University of Tsukuba to the Apple Research Institute in Aomori for actual field test.
[ July 25, 2022] The first demonstration of autonomous driving Speed Sprayer(SS) function at the experimental farm in University of Tsukuba
The development summary of Autonomous Driving Speed Sprayer Control was uploaded to YouTube as a 5min. movie, and linked it to this homepage.
This project was conducted from September 2021 to March 2024 under the Agricultural Machinery Technology Cluster Project, funded by Institute of Agricultural Machinery, National Agriculture and Food Research Organization.
Started a small project with Kyoto University(2023).
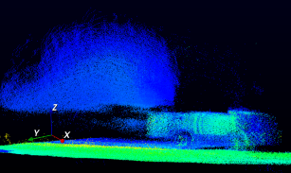
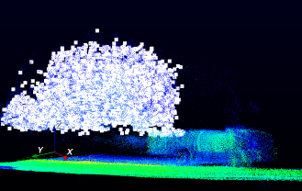
It focused on 3D LiDAR function which can detect pesticide droplet as optical reflection with precise 3D location information.
Utilizing this feature, 3 dimensional position of each pesticide droplet and its point cloud behavior can be observed numerically.
This project has been just started, and we believe this technique can be applied on more expanded analysis in smart agriculture.
This summary was also uploaded to YouTube as a short movie, and linked it to this page.
Thanks to the increase in number of Global Positioning Satellites and wide spread low cost multi-band RTK-GNSS systems,
Stable localization can be obtained even in the high density cultivated apple orchard.
This project has been proceeding in “Consortium of the Development of Smart Technology for Orchard Pesticide Spraying”, which is one of the projects on Agricultural Machinery Technology Cluster funded by Institute of Agricultural Machinery, NARO.
Demonstration at Aomori Prefectural Industrial Technology Research Center Apple Research Institute (September and October, 2022)

Multi-band RTK-GNSS Local Base Station
Optimum control of pesticide spraying
According to the pre-learning information, pesticide spray can be done precisely only to the of apple tree
Automated driving pesticides sprayer by utilizing machine vision technology for localization without RTK-GNSS underneath fruit trees in an orchard.
This work was supported by Cross-ministerial Strategic Innovation Promotion Program (SIP),“Technologies for Smart Bio-industry and Agriculture“(funding agency: Bio-oriented Technology Research Advancement Institution).
Field test movie: Position error correction at the final process of cornering
Introduction of ArUco marker technology
Trajectory compensation on straight path and cornering process

The entrance position guide marker at the orchard
Driving direction control by the geomagnetism
Field test movie: Test run using the geomagnetism
Demonstration movie: At University of Tsukuba
Demonstration at a dwarfed tree orchard in University of Tsukuba
The demonstration vehicle is guided by ArUco marker and geomagnetism
Company name: i Mobility Platform Inc.
Established: July 4 , 2017
Address: 8-23-8 Itsutsu-ga-oka, Toyota city, Aichi, Japan 471-0814
CEO: Masayuki Kawamoto
Capital : 9.9M JPY
Capital reserve: 6.9M JPY

Updated April, 2024